外出をもっと自由に。視覚障がい者の歩行を支える杖型ガイド開発

寄付総額
目標金額 2,000,000円
- 寄付者
- 31人
- 募集終了日
- 2019年12月26日
プロジェクト本文
“外にでることへの気持ちの障害”を軽くしたい。
ロボット技術を活用して、視覚障がい者の単独歩行時のストレスや危険を解消する歩行支援装置「GuiDe Cane」(ガイドケーン)。
杖型ガイドナビの開発から10年。「実用化を加速する」ための応援をよろしくお願いいたします。
視覚障がい者の方が白杖で「カチカチ」と地面を叩きながら歩いているところを見かけたことがある方も多いのではないでしょうか。
人混みの中も慣れた様子で歩いている印象もありますが、「普段通勤などで歩き慣れているはずの道であっても、毎回同じ場所で同じ電柱に肩をぶつけてしまう」、「考え事をしたり体調が悪かったりするだけで迷ってしまい、元の道に戻るのに何時間もかかってしまう」などの困難があります。
また、白杖で触ることができない空中に張り出した看板や木の枝などには、通常の速さのまま無防備にぶつかってしまい、怪我をすることもあります。白杖で歩くためには、常に集中緊張を保つ必要があるのです。

このような、視覚障がい者の方々が直面している課題に対して、現在実用化されている対処法として、盲導犬、ガイドヘルパーや家族に同行してもらうこと、視覚障がい者用スマホナビ*などがあります。
*晴眼者(目が見える人)が使っているスマホナビと同じようなものですが、情報をよりたくさん音声で教えてくれるナビです。今向いている方位や曲がり角までの距離なども教えてくれます。音声では微妙な角度やタイミングを常時伝えることはできないため、白杖を使いこなした上で道に迷わないように助けてくれるアプリです。
しかし、現在実用化している歩行サポートにはそれぞれ課題は残ります。例えば、
ガイドヘルパー:
・予約が必要で、思い立ったときに自由に外出することができない
・利用時間の上限がある
・通勤・通学には制度上使うことができない など
盲導犬:
・育成・飼育にコストがかかるため数が足りない
・育成数と盲導犬が年を取って引退する数がほぼバランスしている など
スマホナビ:
・音声を使って微妙な角度やタイミングを利用者に伝えることはできない
・微妙な角度やタイミングがわかるには現状GPSの精度が十分ではない など
*各所で行われている実験ではビーコン(電波灯台)を追加で設置して精度を高めています。
視覚障がい者の方にとって、安心して、自由に外出できるサポートを。その新たな道として、開発を10年続けてきましたものが、「GuiDe Cane」です。
改めまして、ページをご覧いただきありがとうございます。大阪市立大学の機械力学研究室で講師をしております、今津篤志と申します。ロボット工学、メカトロニクス分野の研究者です。もともと障がい者を支援する技術(アシスティブテクノロジー)や、人と機械が協調して仕事をすることにも興味があり、ロボット技術を活用して、パワーアシスト装置なども研究をしてきました。
私は、障がい者支援は、すべて装置が行うのではなく支援は最小限度にして、本人の能力を最大限使ってもらうのが良いと考えています。
そしてある時、「視覚障がい者を誘導する車両を押して歩いていくと、自動的に車両が曲がって道案内をする、どのくらい曲がろうとしているか押している人に分かる」という歩行補助のコンセプトを思いつきました。
その後、視覚障がい者の方の歩き方を調べると、歩行にストレスを感じていること、気軽に歩きたいというニーズがあること、がわかり、10年ほど前から本格的に取り組んできました。

現在は、研究活動の一つとして、5人の学生と共にこの「GuiDe Cane」装置を開発しています。
簡単な試作機を作って自分たちで目隠しをして歩いてみると、想像していた以上に怖く、最初は恐る恐る歩くことしかできませんでした。視覚障がい者の方たちは、こんな状況で歩いていらっしゃるのだと実感しました。
試作機を押してついていくことは予想した以上に簡単で、数回歩くうちに普通の速さで歩けるようになりました。もちろん、ぶつからないように周囲の人が気をつけて見守っていたことによる安心感もあったのですが、その部分の自動化を確実にしていけば、十分使えるようになると確信しました。
ロボットの世界では自動で目的地まで移動する自律移動ロボットという研究分野があり、その分野の成果を取り入れつつ確実性を向上させていっております。
「GuiDe Cane」これまでの進化
最初は、杖の先には車両がついていました。そこから3輪だったり4輪だったり、三輪車を改造したり、ラジコンカーを付けてみたり、いろいろ試行錯誤しました。
▼「GuiDe Cane」の開発過程





ある時、後輪駆動の自動車のように、前輪だけステアリング(操舵装置)して、後輪の代わりを人間がやってもいいのではないかと思いつき、今の形になりました。
センサーを用いた自律移動ロボットの技術は後から学んだので苦労しましたが、近年自律移動ロボットの技術が公開されるようになってきたこともあって、ある程度の自動化に目処がつきました。
ショッピングモールを使わせていただいて、一昨年は一般の晴眼者を対象に、去年は当事者の方を対象に実証実験を行うことができました。

当事者の方からも、「道案内機能はわかりやすかった」「気を抜いて歩けるのはうれしい」「普段は壁伝いに歩いているので、道の真ん中を風を切って歩くのは面白かった」「早く実用化して欲しい」などの声をいただいています。
▼ショッピングモールで実証実験をしている様子(許可取得済み)
当事者の方に試していただくときは、他の人との衝突を一番懸念していましたが、まずは事故無く行うことができました。ただし、安全性については、まだまだ向上が必要だと考えています。
今回、みなさんのご支援で、この「GuiDe Cane」の実用化を一歩前に進める開発を行います。
それは、長時間運用可能とするための、「充電ドック」の開発です。
初期の導入例として、商業施設や公共施設などの入り口に充電ドックを置いておき、そこから施設内を案内するなどの運用を検討しています。そのため当事者や施設管理者が簡単に充電して継続利用ができる必要があり、そのための充電ドックを作成します。充電ドックができれば、当事者がドックからGuideCaneを外して施設内を歩き回り、帰るときにドックに返却する、という運用を試すことができます。
スマートフォンでも台の上に載せるだけで充電ができるものがありますが、同じことをGuideCaneを充電ドックでも検討しています。ワイヤレス給電システムに実績がある株式会社ビー・アンド・プラス様に電源まわりの設計をお願いする予定です。
このワイヤレス充電は、金属端子を直接触れあわせることなくカバー越しに行う充電です。そのため、防水機能を損なうことがありません。充電ドックと触れあうように下側に電源端子が剥き出しになっていると、水たまりや水はねに弱くなってしまいます。
第一目標達成後、ネクストゴールで目指したいこと。
それは、「防水設計・試作」です。防水機能により、雨天でも屋外で実証実験ができるようになります。現在、試作機で屋外のテストをしたいのですが、現状の試作機は回路などが露出していて防水機能が無く、雨天の場合は中止せざるを得ません。
自分たちでテストするときは別の日にすれば構わないのですが、当事者の方はガイドヘルパーの方を予約して来てくださっているので中止にはできません。そのため、当事者の方に屋外テストをお願いするためには防水機能が必要と考えました。
防水設計と試作は、防水ドローン等の製作実績があるBig Fireworks株式会社様と連携して行う予定です。
現在も開発を進めていますが、装置の実用化のための確実な作り込みは大学研究室が苦手としていることです。しかし、視覚障がい者さまのためにも、開発を止めてはならない。今回、みなさまに支援をいただき外注することで、開発を加速したいと考えました。
また、人混みの中での案内性能や安全性能については、別途改善が必要であり、今回の支援のみで装置の完全な実用化には至る訳ではありません。しかし、これらは、そこへつなぐためには不可欠な開発なのです。
充電機能と防水設計が加わることで、試作テストができる環境が大きく広がります。
今後、人混みでの安全性能を高めることが、課題だと考えています。そのため、自動車の自動運転などでも研究されているカメラ画像からのAIを使った画像認識を行って、周囲の人混みの状態を検出、予測するための技術に取り組んでいます。周囲の人混みを考慮して、衝突を防いだり、よりよいルートを選んだりできることを目指しています。
既にカメラを用いてデータを集め始めており、リターンの一つとして予定している開発協力会では、そのデータを集めるために協力していただく予定です。
まずは、施設内での利用を早期に実現して実績を積みつつ、技術的な改善も行って行きます。将来的には個人が一つ占有して持ち、家から目的地までの公道をいつでも思い立ったときにリラックスして歩けるようにしたいと考えています。玄関に充電ドックを置けば、当事者が簡単に充電し、簡単に持ち出して使うことができます。
視覚障がい者の方や視覚障がい者支援関係者の方と一緒に声を反映しながら実用化を進めたいと思います。
また、GuiDe Caneの実用化が進むためには、街の中での理解、協力が不可欠です。視覚障がい者の方が直面していることをこのプロジェクトをきっかけに知ってほしい。そして、共感してくださった方と一緒に実用化へ確かな一歩進めたいと思っています。
装置の実用化を加速するため、みなさまの寄付をよろしくお願いいたします。

第一ゴール:200万円
■ 充電ドック設計・試作
■ 試作検討費
■ リターン費
視覚障がい者支援装置の試作機の開発(充電ドッグ)を2020年11月30日までに行うことをもってプロジェクトを終了とする。
第一ゴール達成後、ネクストゴールでは、屋外でのテストを可能とする「防水機能を開発」するための費用として大切に使わせていただきます。
※本プロジェクトのリターンのうち、【お名前掲載】に関する条件の詳細については、リンク先(https://readyfor.jp/terms_of_service#appendix)の「リターンに関するご留意事項」をご確認ください。
【個人の方】
税制上の優遇措置を受けるためには確定申告による手続きが必要となります。なお、本学が発行した寄附金受領証明書は確定申告時に必要な書類となりますので、大切に保管してください。
▶︎所得税
所得税法第78条第2項第2号により、総所得金額等の40%を上限とする寄附金額について、2,000円を除いた額が所得額から控除されます。
【参考】寄附金控除による所得税の軽減額
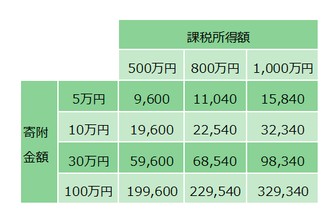
大阪市立大学HP» 大阪市立大学夢基金 » 個人の方のページより引用(https://www.osaka-cu.ac.jp/ja/about/fund/xbtf2s/igkn8b)
所得税の税率・控除額は所得金額により異なります。詳しくは、国税庁タックスアンサーでご確認ください。
▶︎個人住民税
大阪府にお住まいの方は、寄附金額(総所得金額等の30%を上限とする)に対して、税額控除が受けられ、下記の通り翌年の個人住民税額から控除されます。
①大阪府(大阪市・堺市を除く)にお住まいの方は
〔寄附金額-2,000円〕×4%に相当する額(大阪府:4%)
②大阪市にお住まいの方は
〔寄附金額-2,000円〕×10%に相当する額(大阪府:2%+大阪市:8%)
③堺市にお住まいの方は
〔寄附金額-2,000円〕×2%に相当する額(大阪府:2%)
【法人の方】
法人税法37条第3項第2号により、全額を損金算入することができます。
詳しくは「文部科学省 寄附金関係の税制について」をご覧ください。
あなたのシェアでプロジェクトをさらに応援しよう!
プロフィール
今津 篤志(大阪市立大学 機械力学研究室) ロボティクス・メカトロニクスを専門に、人間機械協調やマルチコプターの研究をしています。博士(工学)
あなたのシェアでプロジェクトをさらに応援しよう!
ギフト
3,000円

お気持ちコース
■ 御礼のお手紙をお送りします。
■ 寄付証明書
- 寄付者
- 11人
- 在庫数
- 制限なし
- 発送完了予定月
- 2020年1月
10,000円
【歩行補助装置 実用化への一歩を応援】開発レポート
■ みなさんのご支援で実現した開発レポートをお送りします(PDF)
・御礼のお手紙をお送りします。
・寄付証明書
*開発レポートは、1年の開発後にまとめてお送りいたします。そのほかのものは、順次お送りいたします。
- 寄付者
- 15人
- 在庫数
- 制限なし
- 発送完了予定月
- 2020年12月
15,000円
【触れる小型模型コース】
3Dプリントで作成した、小型模型をお送りします。
・案内動作はしません
・動く部分もすべて動きはしない場合があります。
・現状の試作機の模型であり、実用化時の実機は異なるデザインになる予定です。
・一辺10cmの立方体くらいの大きさになる予定です。
・着色はされません。
・PLA素材で積層型プリンタで作成する予定です。
- 寄付者
- 2人
- 在庫数
- 18
- 発送完了予定月
- 2020年4月
30,000円
【GuiDe Caneを使ってみる】GuiDe Cane 開発協力会へご招待
■ GuiDe Cane 開発協力会へご招待:
大阪市立大学で行う開発協力会に参加できます。アイマスクをしての利用体験、環境を見ながら装置に好ましい動きを教える開発データの取得協力、装置から見える周囲の歩行者のエキストラ役をしていただきます。
*現地までの交通費は別途ご負担をお願いいたします。
*日時は別途調整いたします。
*開発協力会は、開発の元になるデータを取得するために行います。そのため晴眼の方のみのご参加とさせていただきます。当事者の方に体験していただく場は、このクラウドファンディングとは別に設けさせていただきますのでご了承ください。
・御礼のお手紙をお送りします。
・寄付証明書
・みなさんのご支援で実現した開発レポートをお送りします(PDF)
*開発レポートは、1年の開発後にまとめてお送りいたします。そのほかのものは、順次お送りいたします。
- 寄付者
- 0人
- 在庫数
- 10
- 発送完了予定月
- 2020年12月
30,000円
【歩行補助装置 実用化への一歩を応援】開発レポートに支援者さまのお名前を掲載(希望者)
■ みなさんのご支援で実現した開発レポートに支援者さまのお名前を掲載します(希望者)
・御礼のお手紙をお送りします。
・寄付証明書
・みなさんのご支援で実現した開発レポートをお送りします(PDF)
*開発レポートは、1年の開発後にまとめてお送りいたします。そのほかのものは、順次お送りいたします。
- 寄付者
- 2人
- 在庫数
- 制限なし
- 発送完了予定月
- 2020年12月
50,000円
【歩行補助装置 実用化への一歩を応援】HPに支援者さまのお名前を掲載いたします(希望者)
■ HPに支援者さまのお名前を掲載いたします(希望者)
・御礼のお手紙をお送りします。
・寄付証明書
・みなさんのご支援で実現した開発レポートをお送りします(PDF)
・みなさんのご支援で実現した開発レポートに支援者さまのお名前を掲載します(希望者)
*開発レポートは、1年の開発後にまとめてお送りいたします。そのほかのものは、順次お送りいたします。
- 寄付者
- 0人
- 在庫数
- 制限なし
- 発送完了予定月
- 2020年12月
100,000円
【GuiDe Caneを使ってみる】出張開発協力会
■ 出張開発協力会を行います。ただし公道を含まないでできる場所の確保と使用許可の取得を行ってください。複数人で集まっての企画も構いません。とりまとめはお願いいたします。アイマスクをしての利用体験、環境を見ながら装置に好ましい動きを教える開発データの取得協力、装置から見える周囲の歩行者のエキストラ役、をしていただきます。
*内容は要相談
*現地までの交通費は別途ご負担をお願いいたします。
*2020年11月頃を予定。日時は別途調整いたします。
*所要時間:約3時間を想定
*開発の元になるデータを取得するため、一部当事者の方が参加してくださっても構いませんが、晴眼の方が同数以上いらっしゃるようにしてください。
・御礼のお手紙をお送りします。
・寄付証明書
・みなさんのご支援で実現した開発レポートをお送りします(PDF)
・みなさんのご支援で実現した開発レポートに支援者さまのお名前を掲載します(希望者)
・HPに支援者さまのお名前を掲載いたします(希望者)
*開発レポートは、1年の開発後にまとめてお送りいたします。そのほかのものは、順次お送りいたします。
- 寄付者
- 0人
- 在庫数
- 5
- 発送完了予定月
- 2020年10月
100,000円
【歩行補助装置 実用化への一歩を応援】
・御礼のお手紙をお送りします。
・寄付証明書
・みなさんのご支援で実現した開発レポートをお送りします(PDF)
・みなさんのご支援で実現した開発レポートに支援者さまのお名前を掲載します(希望者)
・HPに支援者さまのお名前を掲載いたします(希望者)
*開発レポートは、1年の開発後にまとめてお送りいたします。そのほかのものは、順次お送りいたします。
- 寄付者
- 1人
- 在庫数
- 制限なし
- 発送完了予定月
- 2020年12月
300,000円
【歩行補助装置 実用化への一歩を応援】
・御礼のお手紙をお送りします。
・寄付証明書
・みなさんのご支援で実現した開発レポートをお送りします(PDF)
・みなさんのご支援で実現した開発レポートに支援者さまのお名前を掲載します(希望者)
・HPに支援者さまのお名前を掲載いたします(希望者)
*開発レポートは、1年の開発後にまとめてお送りいたします。そのほかのものは、順次お送りいたします。
- 寄付者
- 0人
- 在庫数
- 制限なし
- 発送完了予定月
- 2020年12月
プロフィール
今津 篤志(大阪市立大学 機械力学研究室) ロボティクス・メカトロニクスを専門に、人間機械協調やマルチコプターの研究をしています。博士(工学)