寄付総額
目標金額 2,000,000円
- 寄付者
- 149人
- 募集終了日
- 2018年9月28日

【姿勢系】姿勢推定プログラムの勉強と作成
こんにちは,姿勢系の松下悠里です.
現在,Q-Liの姿勢推定プログラムを2種類作っています.
①拡張カルマンフィルタ
「フィルタ」とは「与えられたものの特定成分を取り除くこと」です.日常生活でもよく使う言葉ですよね.カルマンフィルタは,人工衛星などのシステムで観測されたノイズ(雑音)を含むセンサの値から,求めたい量を推定するために用いられます.拡張カルマンフィルタは,カルマンフィルタ の中でもよりシステムが複雑な(専門的には非線形と言います)場合に使われます.
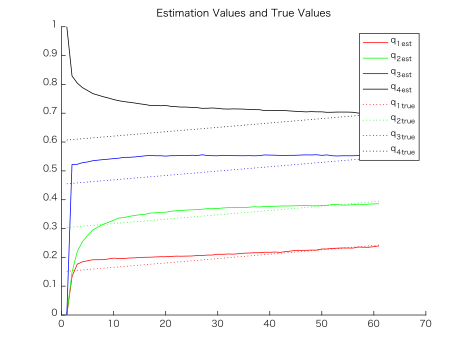
ひとまず,真値は適当な値を入れて,解析してみました.下のグラフは姿勢の推定値と真値です.
また,これは推定値と真値の誤差です.
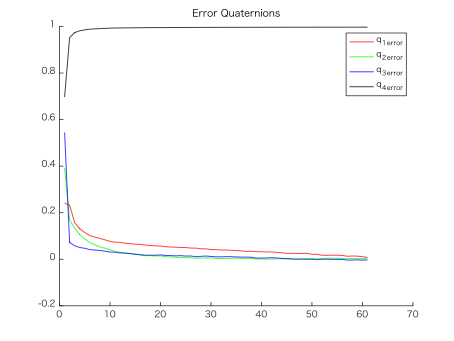
この結果から,約1%の誤差で推定できていることを確認しました.うまくいっています!
②Davenport's q-method
①拡張カルマンフィルタはある時刻の量を推定する際に,1つ前の時刻の量を使って,一つずつ,順番に推定していきます.これを逐次処理と言います.それとは反対に,まとまったデータから姿勢を推定する手法をバッチ処理と言います.これは即時性のない場合に有効な処理の仕方です.バッチ処理による姿勢推定手法として,Davenport's q-methodという手法を導入して現在プログラムを作成しています.だいたい7割くらいはできています.
①②も現在は実際のセンサではなく,モデルを使っています.ここに実際のセンサデータを代入する必要があるので,姿勢のセンサの基盤を早めに作って,次回の担当日に報告します!
![[通信系]アマチュア無線免許](https://readyfor.jp/s3/readyfor-img/project_images/17391/large/93a253400137e6c19a51682bd297505fe5f47027.png?1535531269)
ギフト
5,000円

【未来の宇宙開発を担うQ-Liを応援!】
◆寄附金受領証明
◆お礼のメッセージ
- 申込数
- 42
- 在庫数
- 制限なし
- 発送完了予定月
- 2019年3月
10,000円
【未来の宇宙開発を担うQ-Liを応援!】報告書付き
◆寄附金受領証明
◆お礼のメッセージ
◆研究開発報告書
- 申込数
- 68
- 在庫数
- 制限なし
- 発送完了予定月
- 2019年3月
5,000円
【未来の宇宙開発を担うQ-Liを応援!】
◆寄附金受領証明
◆お礼のメッセージ
- 申込数
- 42
- 在庫数
- 制限なし
- 発送完了予定月
- 2019年3月
10,000円
【未来の宇宙開発を担うQ-Liを応援!】報告書付き
◆寄附金受領証明
◆お礼のメッセージ
◆研究開発報告書
- 申込数
- 68
- 在庫数
- 制限なし
- 発送完了予定月
- 2019年3月

「防衛技術博物館を創る会」のマンスリーサポーターを募集します!
- 総計
- 530人

能登半島地震で全壊した須須神社奥宮|再建を叶え、ミホススミ神に光を
- 現在
- 1,240,000円
- 支援者
- 44人
- 残り
- 55日

コウノトリと共に生きる郷づくり~環境保全プロジェクト~
- 現在
- 29,000円
- 寄付者
- 5人
- 残り
- 35日

国立科学博物館マンスリーサポーター|地球の宝を守りつづける
- 総計
- 679人

NPO法人札幌カラス研究会の活動費を維持したい
- 総計
- 23人

えん罪のない世界へ!IPJサポーター
- 総計
- 79人
多領域と未来を紡ぐ「音声コーパス」の継続的な維持・拡大へのご寄付を
- 現在
- 3,270,000円
- 寄付者
- 78人
- 残り
- 35日